









解决“停车难”问题,只有通过不断增加停车泊位的供给,实现供需平衡,但由于停车设施的建设需要一定的建设周期,短期内迅速提供大量的泊位供给是不现实的,因此为了切实可行的改善“停车难”问题,一方面要加大投入,提高建设效率,加快停车泊位的市场供给,另一方面需要对现有停车资源进行整合 ,提高车位利用效率,缓解供求矛盾。


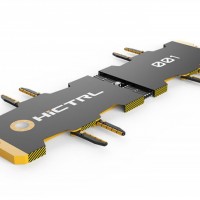









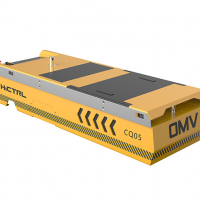
本网页所展示的有关【OMV夹持式停车机器人_AGV/AMR本体_上海汇聚自动化科技有限公司】的信息/图片/参数等由移动机器人(AGV/AMR)产业联盟的会员【上海汇聚自动化科技有限公司】提供,由移动机器人(AGV/AMR)产业联盟会员【上海汇聚自动化科技有限公司】自行对信息/图片/参数等的真实性、准确性和合法性负责,本平台(本网站)仅提供展示服务,请谨慎交易,因交易而产生的法律关系及法律纠纷由您自行协商解决,本平台(本网站)对此不承担任何责任。您在本网页可以浏览【OMV夹持式停车机器人_AGV/AMR本体_上海汇聚自动化科技有限公司】有关的信息/图片/价格等及提供【OMV夹持式停车机器人_AGV/AMR本体_上海汇聚自动化科技有限公司】的商家公司简介、联系方式等信息。
在您的合法权益受到侵害时,欢迎您向邮箱发送邮件,或者进入《网站意见反馈》了解投诉处理流程,我们将竭诚为您服务,感谢您对移动机器人(AGV/AMR)产业联盟的关注与支持!

