






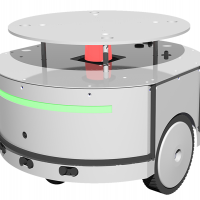










Q300 在工业室内场景下,激光扫描完成雷达水平面的地图构建,通过坐标问询协议,为移动机器人实时输出设备的二维坐标与航向角(x.y.θ)
控制器使用一套激光测量系统,在一个平面借助激光束敏感地扫描其周围的轮廓,在二维坐标系中测量其周围环境。传感器测量光从发射到接 收到反射的飞行时间(TOF,Time of Flight),激光测量设备就可计算出对象的距离。
根据实际用户需求,Inbox 还可以输出如下信息:
反光柱位置信息,雷达水平面的地图、查询定位精度。导航系统可以使用这些信息来调整 AGV 的行驶路线。

