
















Q600 在工业室内场景下,完成移动机器人的地图构建,作业点设置,全局路径规划等自主作业的全套任务,并实时下发整车速度指令以便完成机器人本体的运动及作业控制。
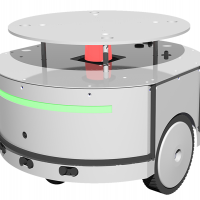
操作界面友好,自带WIFI功能,具备标准的调度系统接口和底盘车辆控制器接口,并且集成了三种常见AGV的运动控制模型,即单舵轮驱动 转向、双差速轮驱动和麦克纳姆轮驱动模型。同时免费配备单机板AGV调度系统,方便车辆调试。Q600可以应用于多个场景和多种AGV机 型,包括叉车、潜伏式AGV、自动泊车AGV、舞台AGV、重载AGV、超大型AGV和巡检机器人、服务机器人等等。
支持双雷达模式,完美解决因车体结构设计造成的雷达扫描角度损失,雷达水平面可提供辅助避障功能;可以备份和导入调试参数,方便用户调试和使用;可提供调度系统中常用的交互命令,方便客户调度系统的开发和使用。

