在过去几年,中国集成电路产业在政策以及资本的带动下变得异常活跃。2014 年 9 月至今,国家集成电路产业投资基金总规模 1387.2 亿元,企业、地方产业基金规模累计超过 5000 亿元的佳绩,以半导体为核心的中国电子产业正步入大发展的战略变革期。而半导体行业的物流升级也成为其变革期中重要的环节。仙工智能作为国内优秀的工业物流解决方案提供商,已经在半导体行业深耕多年,针对半导体行业痛点,逐渐形成了具有仙工智能特色的一站式半导体行业解决方案,并在多家头部半导体客户中得到方案落地。
以下是仙工智能晶圆搬运机器人在半导体行业中的应用。
半导体行业制程工艺流程
半导体行业制程工艺流程还是比较复杂的,可以分为下图所示的二十几个工艺:
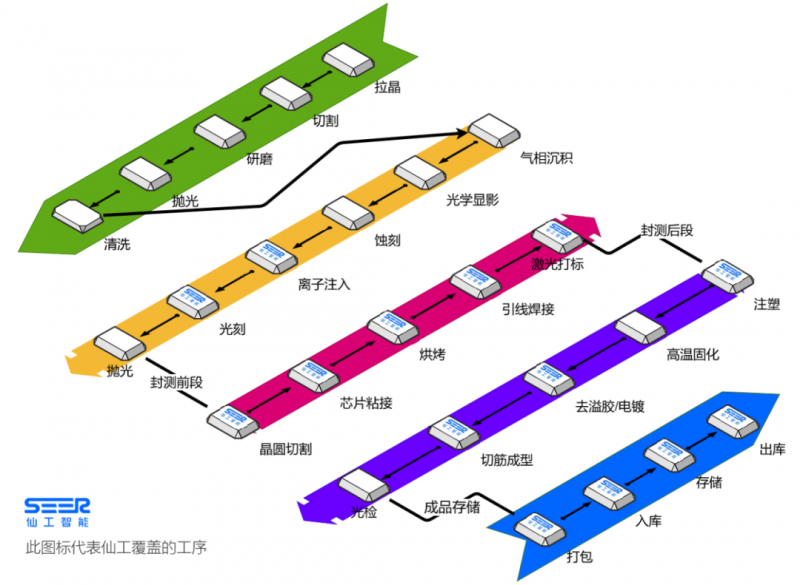
半导体行业制程工艺流程示意图
概括来说半导体元件制造过程可分为前段制程(包括晶圆处理制程、晶圆针测制程);还有后段制程(包括封装、测试制程)。
仙工智能经过多年的耕耘,已经覆盖了半导体行业制程工序的绝大部分工序,从 IC 制造到 IC 封测的工序间物料到成品和原材料的存储和出入库等传统物流工序都有覆盖。今天分享的就是其中的晶圆处理制程。
晶圆处理制程工艺流程
所谓晶圆处理制程,主要工作是在硅晶圆上制作电路与电子元件(如电晶体、电容体、逻辑闸等),是各制程中所需技术最复杂且资金投入最多的制程。以微处理器(Microprocessor)为例,其所需处理步骤可达数百道,而其所需加工机台先进且昂贵,动辄数千万一台,其所需制造环境也颇为苛刻,需在温度、湿度与含尘(Particle)均被控制的无尘室(Clean-Room)中进行。虽然详细的处理程序与产品种类与所使用的技术有关,不过其基本处理步骤通常是晶圆先经过适当的清洗(Cleaning)之后,接着进行氧化(Oxidation)和沉积,最后进行微影、蚀刻以及离子植入等反复步骤,最终完成晶圆上电路的加工与制作。
晶圆搬运机器人案例分享
以本项目为例,晶圆处理制程可以分为下图所示的几个工序。

晶圆制程工序流程示意图
根据项目工艺以及现场设备的布局,仙工智能给出了合理化的实施方案。
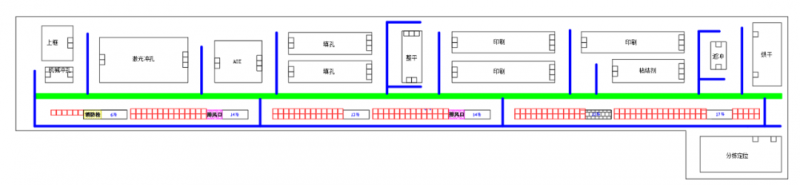
项目方案布局示意图
并根据项目的特殊性仙工智能定制了自主研发的激光 SLAM 导航的晶圆搬运专用机器人。
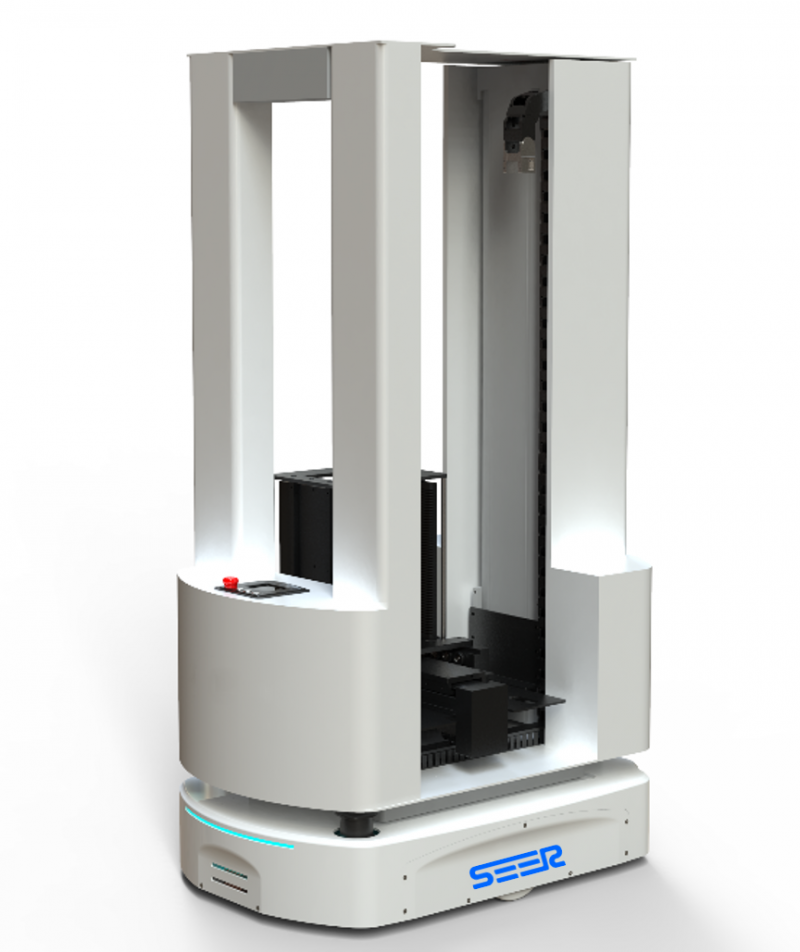
仙工智能晶圆搬运专用机器人
方案构成:
①仙工智能晶圆搬运专用机器人
②自动充电桩
③RDS 统一资源调度系统
方案价值:
仓储管理、物料运输、设备对接。车体采用上海仙工智能科技激光 SLAM 导航车,内置仙工智能自主研发控制器进行运输任务。
此项目采用的是仙工智能 RDS 统一资源调度系统进行整场项目物料运输、设备对接、仓储管理及物流管理,并将 RDS 系统与客户端 WMS+SCADA 系统进行对接,为 WMS 系统提供仓储及物流信息。
整体方案提高了客户工厂生产效率和生产透明度、降低工人劳动强度,并实现大幅节省人力成本,为半导体行业客户的物料仓储及运输提供了智能化及数字化升级服务。
仙工智能激光 SLAM 导航技术介绍
传统的 AGV 导航主要有磁条导引、磁钉导引、色带或二维码导引等,虽然简单易行、路径跟踪可靠性好,但均属于固定路径引导方式、灵活性和柔性差。基于 SLAM 的激光导航是目前最先进的导航方式,已经成为移动机器人的的重要发展趋势,并习惯称之为 AMR。
仙工智能基于 SLAM 的激光导航 AMR 技术难度增加,采用的是同时定位与地图构建技术(Simultaneous Localization And Mapping,SLAM),是一种实现真正全自主移动机器人的关键技术。
仙工智能的激光 SLAM AMR 具有自主绘制地图,自主导航特点。所谓的自主绘制地图就是指自主激光 AMR 小车在任何一个陌生的场景,只需走一遍,就能自主绘制相应地图;无需磁条、磁钉、色带、二维码等辅助定位设施,就能自由导航,自动规划路径,自主行驶,安全可靠高效
仙工智能在此基础上结合用户场景的具体需求,打造了多种运动及规划模式,并且做到每条线路的运动属性的可视化配置,让用户可以所见即所得地对环境中的线路等进行编辑和优化。
半导体行业的智能物流升级还有很多课题,如传统复合机器人 2D 视觉系统成本高、抓取过程中的安全保证、如何实现振动抑制、各个工序间如何实现节拍匹配等等。