物流场景作业纷繁复杂,从仓库或工厂选址设计、施工,到自动化设备的部署实施和上线运营,这是一个长周期的系统化工程。其中,调度系统扮演着核心角色。作为物流机器人系统的“神经中枢”,通过对整个系统中资源的配置管理与动态分配,对各类物流移动机器人的任务指派、调度协同和交通管制,实现多台机器人协同作业,在项目的实施过程中起着关键性作用。

凯乐士PTR调度系统是一款针对物流移动机器人的集中调度系统,其底层模块化设计、可视化管控、高效调度、通用化接口等,赋能物流移动机器人及解决方案高柔性、高效率、易部署的优势。

开箱即用
不需要额外的服务器资源,便可实现自主调度和库位管理等功能。通过配合“呼叫器”或“任务流”等业务模块,PTR可以快速地实现点到点、区域到区域的搬运任务。可以帮助小型企业在设备投入使用后迅速获得物流自动化效益。
模块化设计
系统底层采用模块化设计,将复杂的系统拆分为更小、更可管理的部分,使系统的不同功能和任务可以独立开发、测试和维护。每个模块专注于解决特定的问题或提供特定的功能,同时与其他模块进行交互和协作。通过底层模块化设计,系统的各个模块可以独立进行开发和更新,而不会对其他模块造成影响。
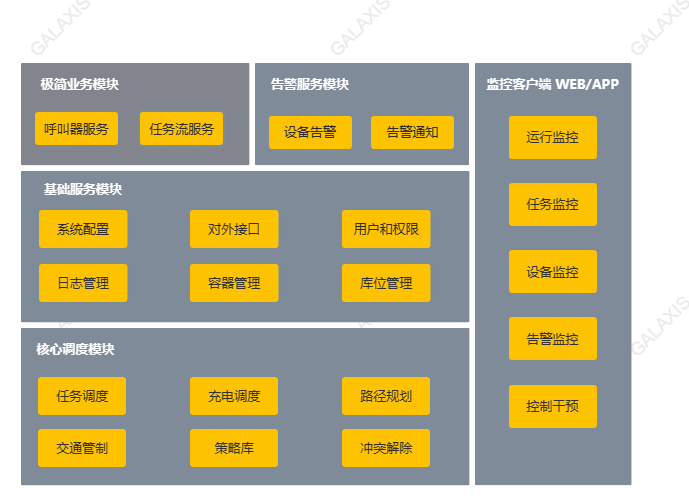
尤其当业务结构产生波动时,在发挥整体系统最优前提下,简单增减相关模块即可稳定适应当前业务,其稳定性和可扩展性尤为突出。
个性化组合
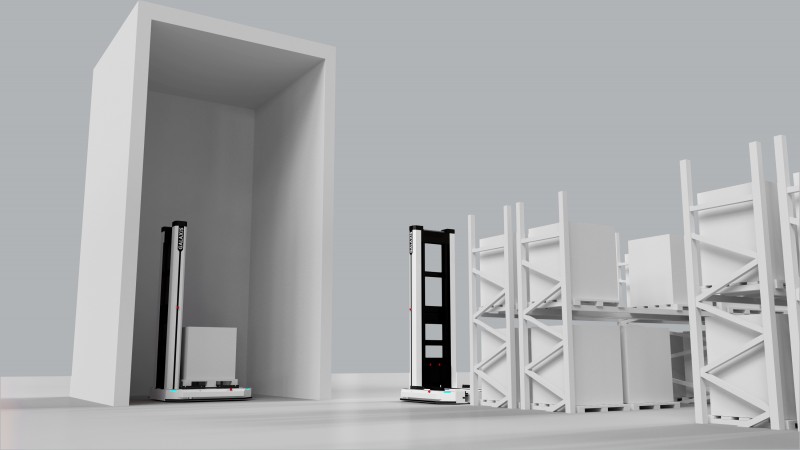
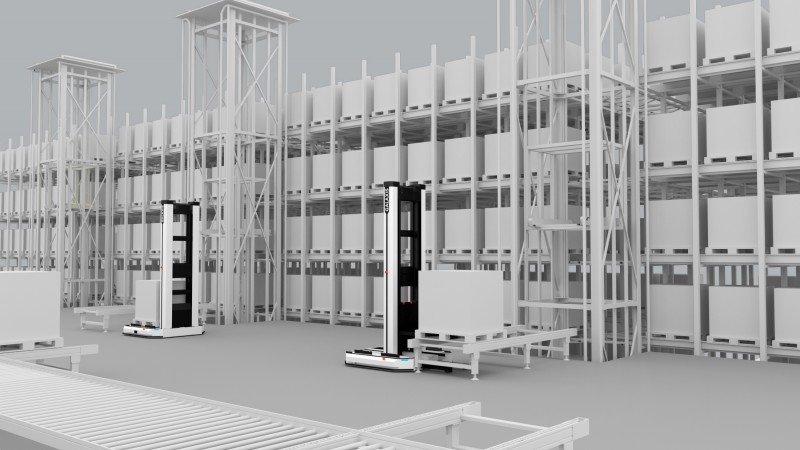


PTR在任何复杂的场内环境下都能自如实现高效的设备搬运作业,这归功于它个性化组合及自由选配的能力。
它可兼容调度凯乐士全系列智能机器人(托盘/料箱穿梭车、AMR系列等)及生态合作伙伴的物流设备,在同一张地图内进行多种类设备统一调度,协同作业。
尤其在应对各类超窄巷道密集托盘存储和托盘与输送线对接的复杂情况,为用户提供极大的便利,同时降低定制业务的开发门槛,提升项目交付效率。
高效调度算法
PTR调度系统的核心是其高效的调度算法,该算法可以降低规划和实施的难度复杂度、利用通用算法灵活地应对各种业务场景,提升全局执行效率。
同时,系统采用了一系列优化措施。例如,增加自动拆叠盘功能、轮廓碰撞算法、路径冲突算法等,使小型项目无需额外配置更多策略。算法还支持多种作业模式(车找任务、任务找车)等联合调度。
无论是面对中大型物流中心内大量机器人高效协同作业的困难度还是小型仓库内复杂的作业环境,都可通过PTR调度系统破解当下难题。
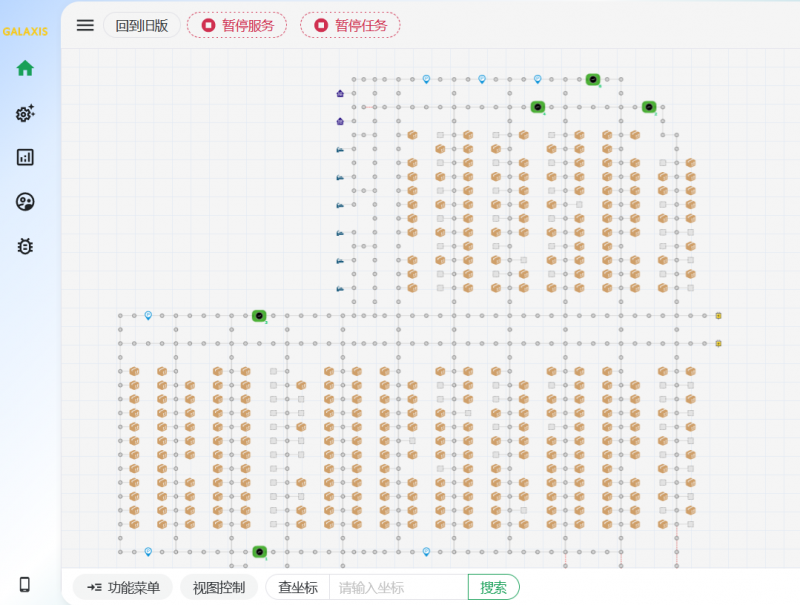
可视化管控
直观易用的界面让用户能够实时监控机器人的运行状态、任务执行情况和异常处理情况等重要信息。通过可视化界面,用户可清晰地了解每台机器人的当前位置、速度、电量及任务执行情况等关键指标。
值得一提的是,界面提供了异常处理情况的实时提示和报警信息。一旦发生异常情况,系统会立即发出警报,并在界面反馈这样的设计使得用户能够方便地获取实时数据,及时发现问题并进行处理
.png) 。
。
通用化接口
凯乐士PTR调度算法支持市面上常见的多种对接协议,包括Restful API、Socket、数据库中间表、消息中间件等。针对不同的上位系统,还提供了更多的模块化功能支持,比如订单和库存管理模块、库位管理模块、数据采集模块等。这些功能支持可以帮助客户快速集成调度系统到自己的业务流程中,提高生产效率和物流运营能力。

创新专利
凯乐士目前已申请并授权了多项PTR调度算法方面的专利。比如,窄巷道双侧取货调度专利、PTR拆叠盘调度专利、PTR分拣业务调度专利等,这些专利使得系统在应对复杂场景和提高调度效率方面具有更加优越的性能。