更复杂的环境需要更强大的感知
导航技术变革推动移动机器人应用加速
核心传感器是决定移动机器人性能的关键
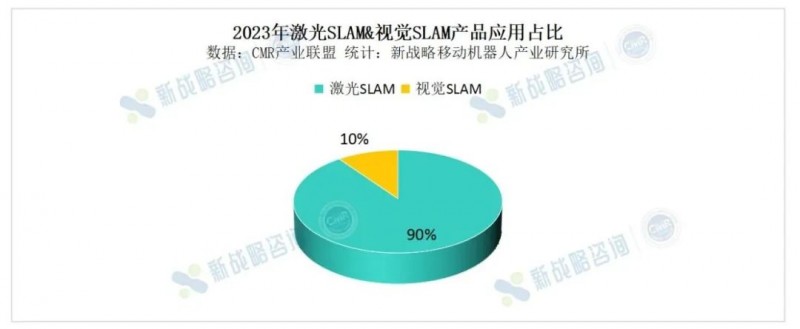
性价比提升,3D激光雷达应用加速
工业场景:无人叉车厂商的率先试水

2023年5月,未来机器人重磅推出新一代产品——VNST20托盘搬运无人叉车,VNST20通过一颗3D激光雷达,集成定位、感知、防护功能一体,在提升叉车感知定位精度同时,增强车身安全防护功能。VNST20托盘搬运无人叉车重复定位精度可达到±10mm,±0.5°;重复放货自适应精度达到±10mm,±0.5°。

激光雷达小型化更便于机器人集成应用。据览沃相关负责人介绍,Mid-360体积仅有一个网球的大小,相较于觅道系列上一款产品Mid-70缩小近60%,且大部分体积可被嵌入式隐藏,需外露的半球形窗口直径仅为4.5厘米,高度为2.5厘米。小巧的机身不仅为无人叉车设计预留更多空间同时也可以进一步美化车体外观。
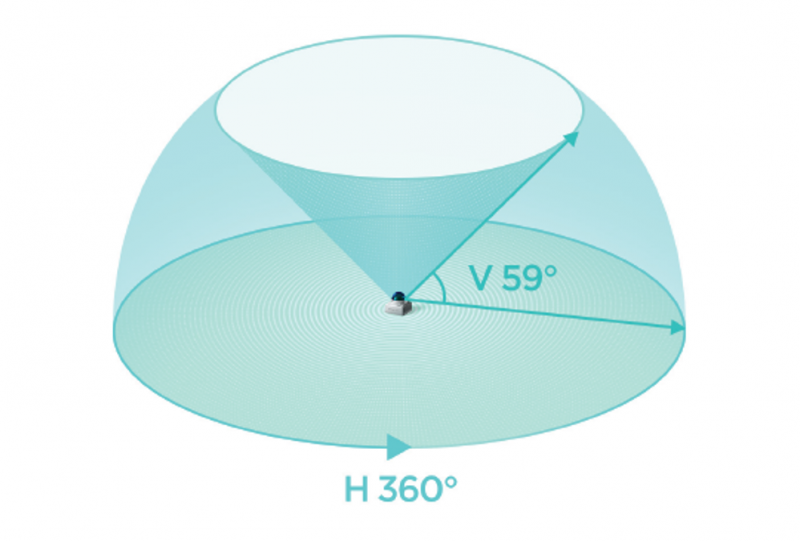
随着移动机器人被越来越大规模应用,览沃还考虑到了雷达之间的对射以及户外复杂光环境容易带来信号干扰的情况。Mid-360引入了抗干扰的设计,即便在室内多台激光雷达信号混行的环境中,仍能保证互不干扰,稳定运行。同时,Mid-360能抵抗100Klux阳光直射,在室外强光环境下的性能与室内一致出色,可以保障从室外到室外跨场景运行无缝衔接。
家庭商用领域:去RTK的有效验证

目前,业内智能割草机器人在定位方面主要有两种技术方案,一是基于惯性导航的埋线式方案,二是非埋线式方案。埋线式方案是当下主流的技术方案,该方案的优势是成本较低,但缺点在于无法实现精准定位,成本还会随着草坪面积增大而增加,且耗时长、布置灵活性差。非埋线方案则一般是依托RTK卫星定位技术与并综合IMU和视觉等其他传感器,来提升割草机的灵活性,但也会面临基站信号易存在遮挡,可能导致定位存在偏差,从而产生漏割、偏移预设路径等问题。
突破边界 走向智能感知新时代

未来,全生命周期SLAM、动态目标滤除、多传感器融合、语义分割与识别等是移动机器人进一步提升导航能力的主要路径。在这一过程中,相信3D导航技术的应用将会不断增多。





