从精密工业应用至泛化商业部署

工业移动机器人与商用移动机器人的需求呈现出显著的差异性。工业移动机器人的需求主要集中在提高生产效率、保证操作精度以及实现复杂任务的自动化上。这类机器人通常在制造、物流和仓储等环境中被部署,以执行精确的搬运、组装、检测和包装等工作。它们必须满足高可靠性、强耐用性和易于集成进现有工业控制系统的要求。相比之下,商用移动机器人则更注重灵活性、用户友好性和成本效益。它们广泛应用于零售、医疗、酒店和清洁等服务行业,旨在提升客户体验、减轻人力负担和优化服务流程。商用机器人通常需要具备较高的交互能力,以适应不断变化的消费者需求和多样化的操作环境。此外,它们还需具备一定程度的自适应能力,以便在非结构化的环境中安全高效地工作。同时,商用移动机器人领域对成本控制持有高度敏感性,产品设计需在确保性能标准的同时,采取各种措施压缩成本,以提升性能与成本之间的比值,实现更优的成本效益比。

应对商业与工业的特性,英特尔推出了能适应不同需求的产品方案,迅速赋能客户。公司构建了一个集成硬件、边缘计算、性能优化和技术创新的解决方案矩阵,旨在推动中国AGV/AMR产业的智能化转型,并深化对移动机器人关键技术及多场景应用需求的理解。

硬软件方案协同,全面赋能移动机器人

在执行方面,针对移动+操作的应用场景,英特尔提供工业边缘控制软件平台ECI,对Linux kernel进行实时性调优,集成PREEMPT_RT和Xenomai的实时补丁,以达到更好的实时性能。此外,英特尔还提供实时的EtherCAT master stack和CANopen stack,方便不同类型的伺服器和电机接入,并支持一些简单的运动控制模块参考设计。
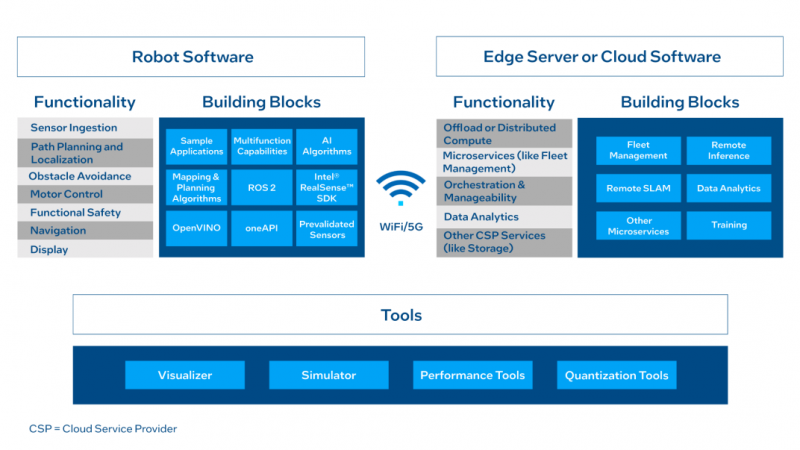
例如,英特尔的Robotics SDK提供了一套全面的软件算法解决方案,包括视觉同步定位与地图构建(VSLAM)技术,该技术结合英特尔®实感™(Intel®RealSense™)摄像头,能够快速实现自主移动机器人(AMR)的地图构建和精确定位导航。此外,针对提升群体智能,英特尔推出了多机协同建图(Collaborative SLAM)的参考软件,该软件搭配英特尔研发的特征点提取和匹配算法,显著提升了在大规模场景中多AMR协同作业的SLAM建图效率。针对特定应用场景中的地面不均匀或倾斜问题,英特尔还开发了地面分割(Groundfloor Segmentation)算法,确保AMR在复杂地形中的稳定运行和适应性。这些先进的软件工具和算法,为客户提供了强大的技术支持,使得AMR能够更加高效、灵活地部署于各种工作环境。





