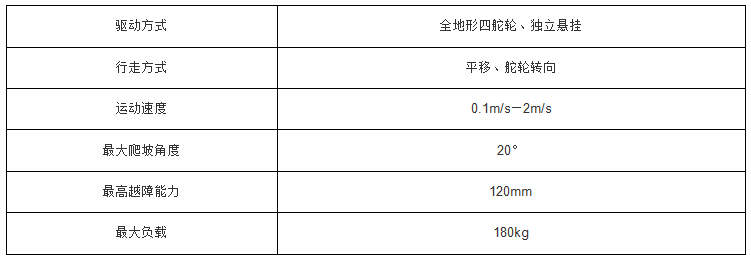
2021年8月,广东天太机器人有限公司发布了全地形四舵轮机器人(AGV)运动结构方案。该方案集成了驱动、转向、减震三个系统,解决了以往机器人设计生产中“要多模块设计,多方案配合”的尴尬,为巡检机器人等户外用机器人设计生产提供了更优的解决方案。
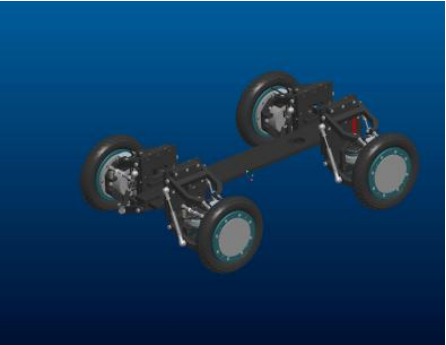
四舵轮八连杆 独立悬挂的结构方案
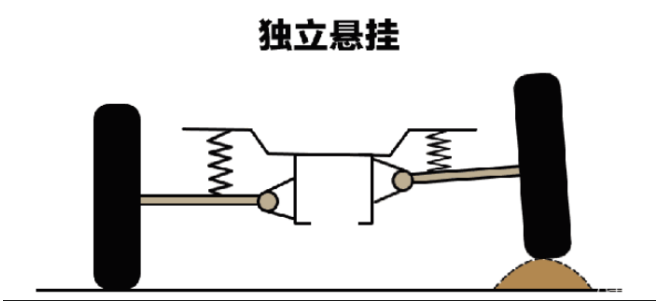
方案是针对户外机器人在运行中面对的多种场景,多地形而设计。该方案不但整体重量变小、减少了车身受到的冲击力,并提高了车轮的地面附着力;左右车轮单独跳动,互不相干,大幅度地减小车身的倾斜和震动,保证了行驶的平稳性,可轻松应对各种崎岖地形。
全地形四舵轮机器人运动结构方案内含两个减速机组成的关节总成,在保证高承载力、小体积、轻重量的同时,也提升了传动效率,保证了传动精度。
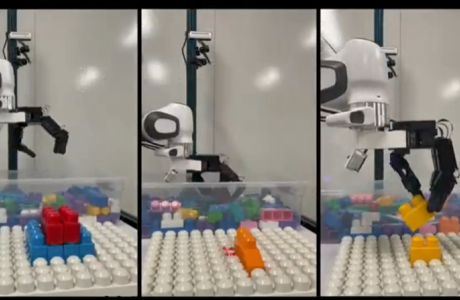
同时,该运动方案采用了天太完全自主知识产权的机器人运动部件——智动轮,智动轮具有高响应速度、高定位精度、体积小、功能性集成度高等特点,可实现多场景小空间的灵活运动,可高效实现自动化控制与应用。
目前来说,天太全地形四舵轮机器人运动结构方案,它结构紧凑、传动效率高、能够实现快捷、精准的全向运动,是解决以往机器人运动方案中的运动部件体型笨重、结构冗余、转向不灵活,没有减震等问题的最优方案。
让机器人设计像搭乐高一样简单
天太全地形四舵轮机器人运动结构方案采取了模块化的思路,将此前机器人全地形运动系统中的驱动轮、电机、减速机、控制器、方向机、悬挂……大大小小几十种零部件进行集成,用组合的办法搭建出一个全新的产品形态。最终得到了一套集四舵轮、八连杆、独立悬挂于一体的巡检机器人全地形运动解决方案。
其结构更紧凑、体积小巧,在应用中可以给机器人更多设计空间,能极大限度地满足小型化、轻量化、模块化的需求。
该方案可以让客户在使用过程中即插即用, 像搭乐高一样简单、快捷。在整个设计、生产流程中,客户只需要考虑如何设计产品的核心功能,无需再从新考虑机器人的运动方案,从而省去了几十种零配件选型、设计、采购、组装的人力和时间成本。
同时这种布局的好处也显而易见,对公司内部成本来说,产品的多样性与标准化、模块化并存,有利于综合成本的降低与自身产品闭环的搭建。而在将产品导入客户时,也将促使客户产品模块的标准化转变,优化整个产业链条上物料、装配、成本、供应商及售后服务管理等环节,并与工业客户保持高度的连接,及时了解双方生产、供应需求。
让机器人随处可见!
天太机器人执行总裁郑滨表示:未来,天太机器人将继续推出更多类似于乐高玩法的组合方案,继续坚持低价格+低成本+低能耗的理念,在保质增效的基础上进一步强化技术的高集成度、产品的高普及率,为工业产业发展不断助力,让工业应用移动机器人随处可见的愿景得以更快速地实现。